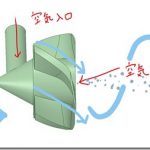

3Dプリントして作った昇降ユニットです。
負荷がかからないので剛性低くてもいいだろうとこんな構造にしてたのですが
ワークと電極が接触してしまった場合溶着し引き離すのに力がかかるため
アームが歪む問題がありました。

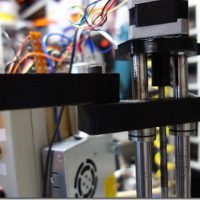
そこでアームはアルミフレームに変更しリニアブッシュも4個に増やしました。
これで歪むことなく動作します。

Arduinoとモータードライバの電源は別にしていたので
手元にあった24Vの電源を追加。
レギュレーターで5Vと12V出力できるようにしました。
これでコンセント1つから全電源を確保できます。

ポンプと水槽を追加。
更に極間電圧の比較値を調整できるようにボリュームを追加。
これでワークの材質、電極のサイズ別に放電距離を調整できます。


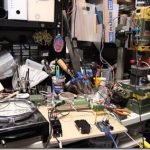
加工中。

加工の様子。

1時間かかって厚さ8mmのS45C材に1.5mmの穴を空けれました。
今の電源だとこのぐらいのスピードが限度でしょうか。
まだまだ研究が必要です。