サーボを使った工作をしたくなったので
ロボットを作ることにしました。
どうせなら多脚がいいなと思い6脚型にすることに。

2関節✕6脚で12個のサーボを使い動かすようにします。
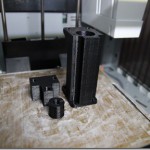
サーボは最初S03N 2BBMGというよく見るタイプのサーボを
使おうと作ってたのですが・・・

見ての通り超でかくなったので

SG90というミニサーボを使うことにしました。
実際つかうのは安価に売られてるコピー商品ですが。
ちなみに購入したやつは1個ギアが空回りする物が入っていました。
こういうのは安価コピー品あるあるなので多めに買うようにしてます。

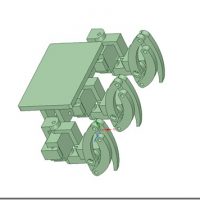
脚や胴体は3Dプリンタでつくります。
最近は新しい3Dプリンタの方でPLA樹脂を使ってプリントすることがほとんどです。
硬いので細くてもしっかりしてます。

CADでモデルを反転させる方法がいまいちわからなかったので

右半分だけモデルを作ってCuraで反転させて出力しました。


全部の部品出力にかかった時間は12時間くらいだったかな?
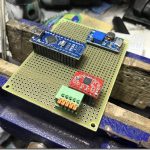
ハードの方はできたので現在ソフト面を製作中・・・。