どもです。
YouTubeで動画見てたら基板をマジックでマスキング機械を見つけました。
自作基板作る際に感光基板やCNCで削り出す方法がありますが
CNCは結構面倒で感光基板も難しいとかなんとか。
レーザープリンタのトナーを基板に熱転写する方法なんかもやってみたのですが
うまく行かず結局マジックで修正したりしてました。
これは失敗が少なそうなので挑戦してみることに。
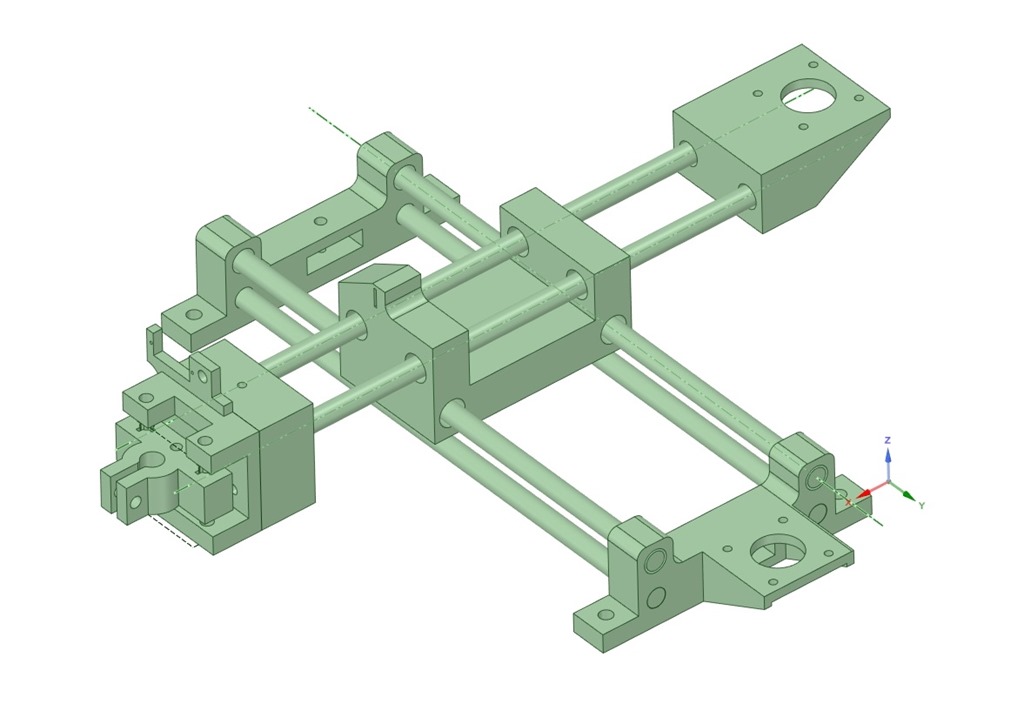
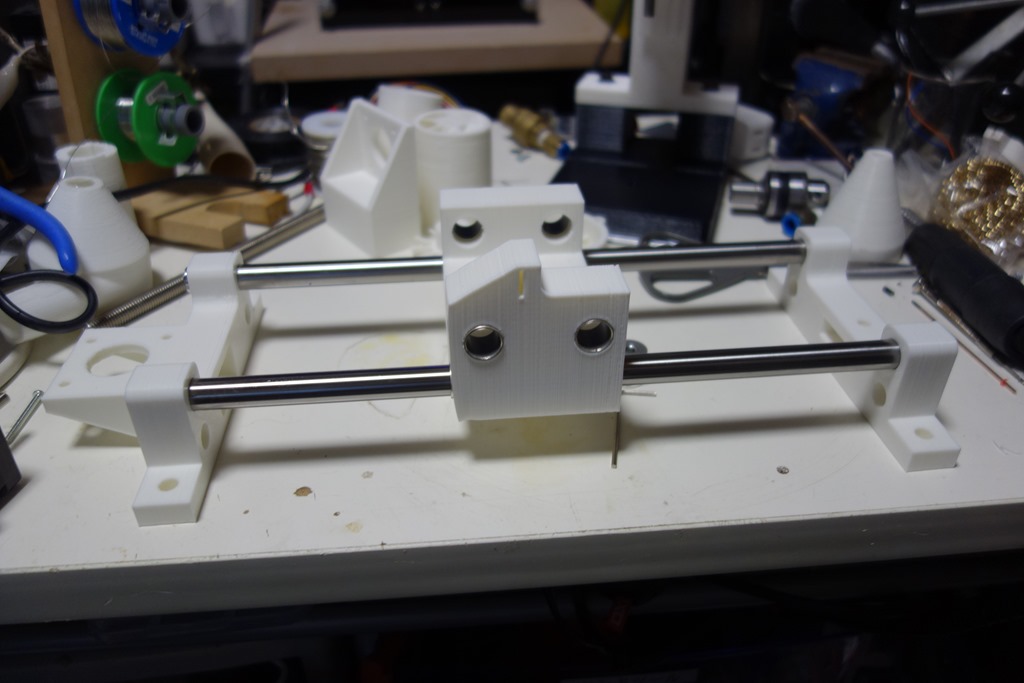
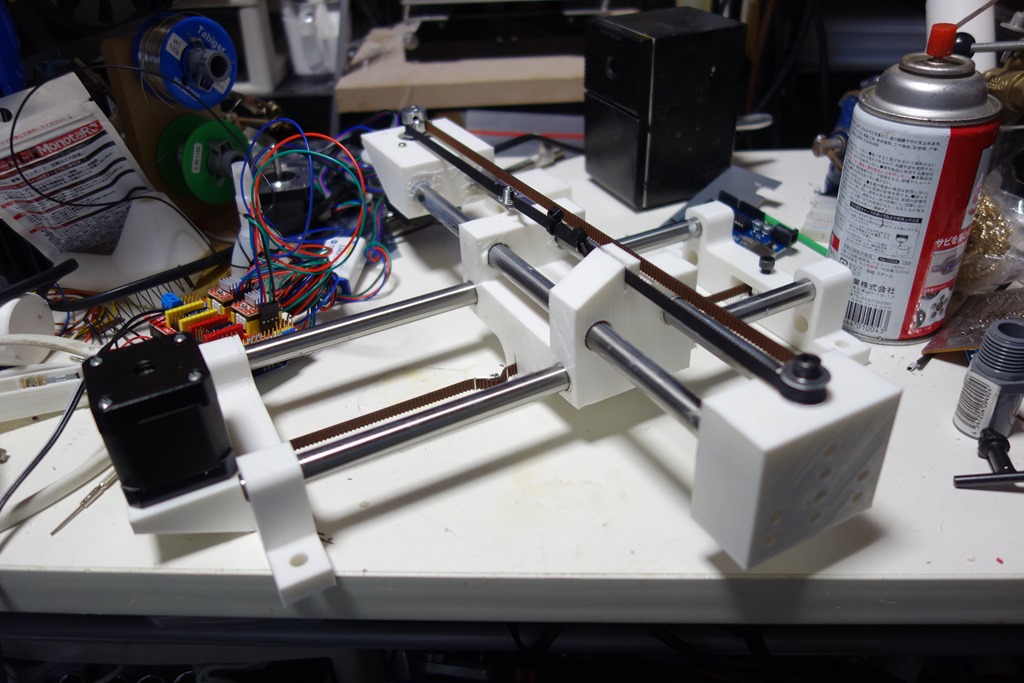
まずCADで2軸のプロッタを設計。
手持ちの12mmリニアシャフトを使用して作ってみます。
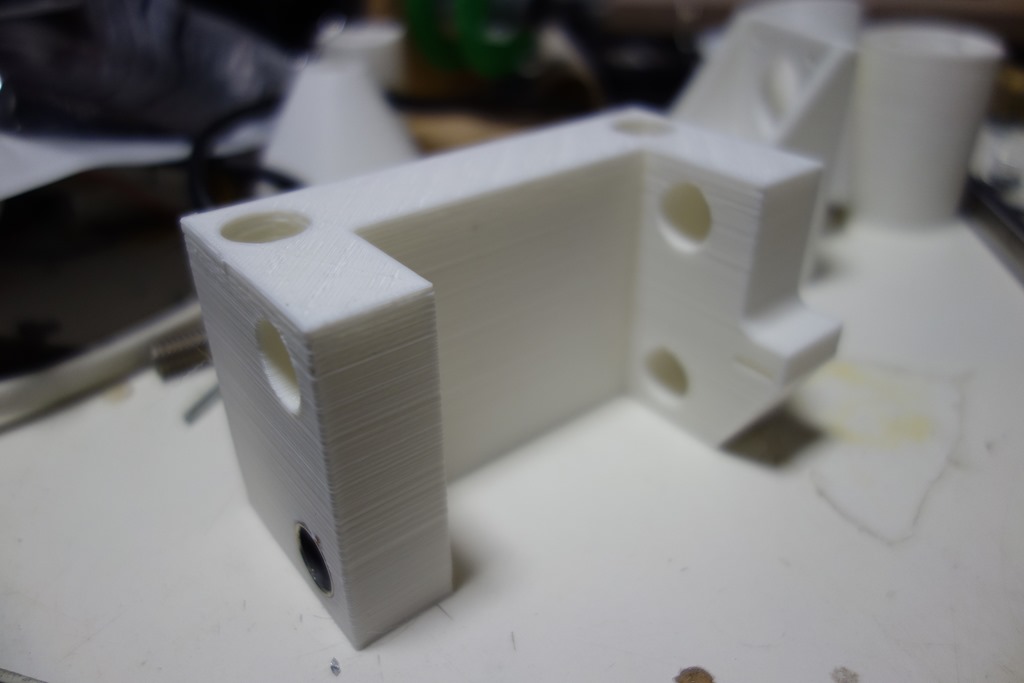
プリントしました。
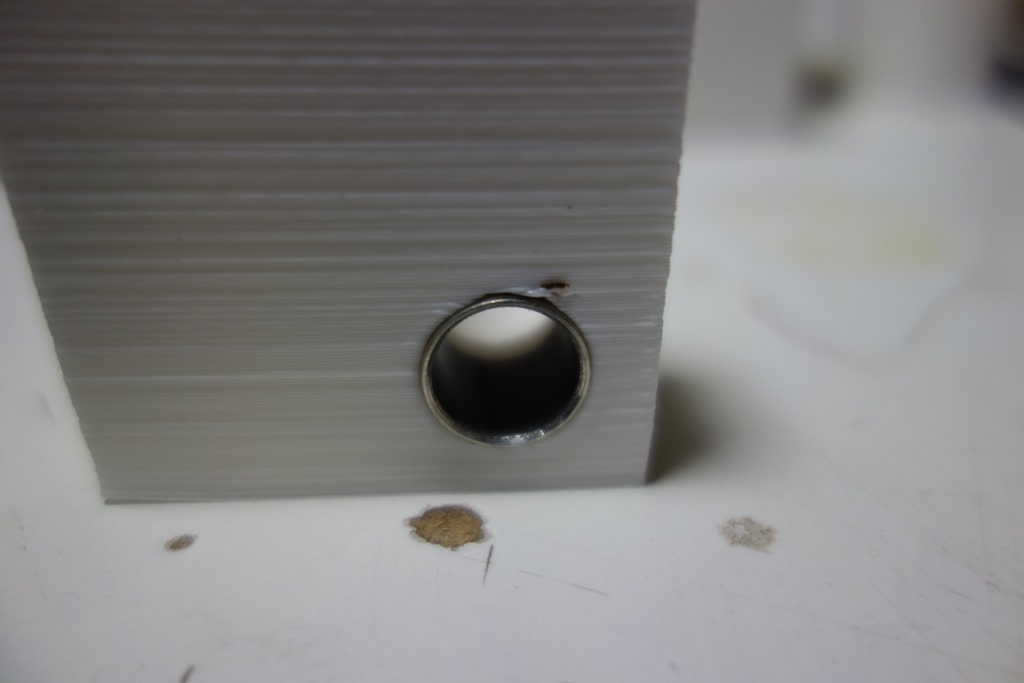
これにブッシュを圧入します。
圧入完了。
ちょっときついので心配・・・。
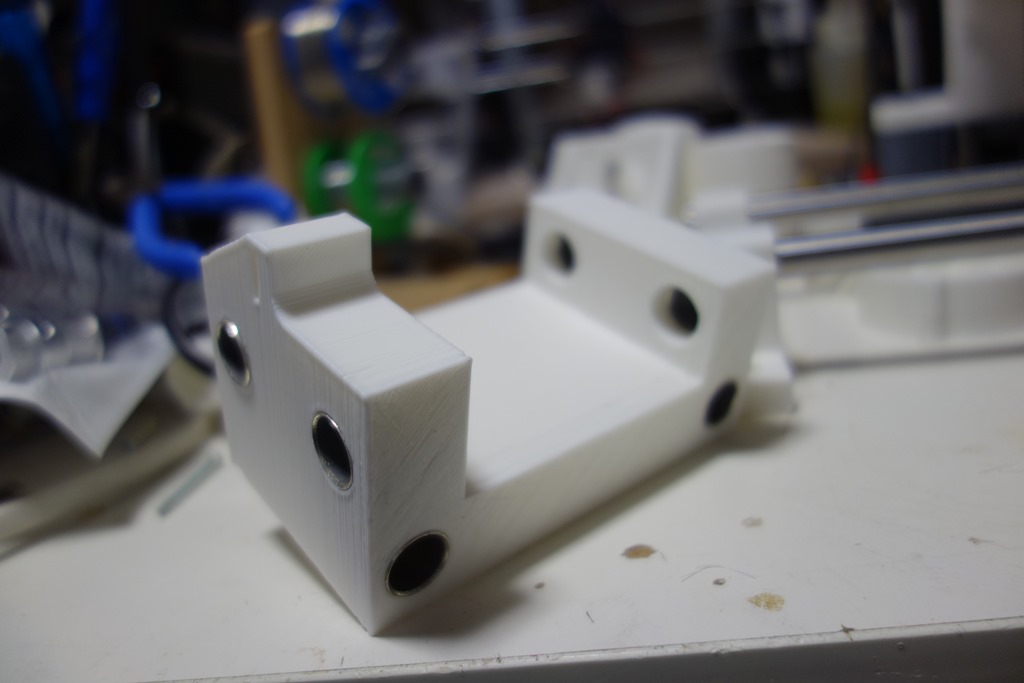
XY8箇所圧入しました。
シャフトを通してみると動きが重くまっすぐブッシュが挿入されてないようです。
ある程度軽くなるまでブッシュを調整しなんとかベルト駆動できる
程度までスムーズに動くようになりました。
次にモーターとベルトをつけていきます。
最初に買ったモーターはトルクが26Ncmで脱調して動かなかったので
倍の59Ncmの17HS19-2004S1Cモーターに交換。
これでうまく動作したので2軸ともこのモーターにしました。
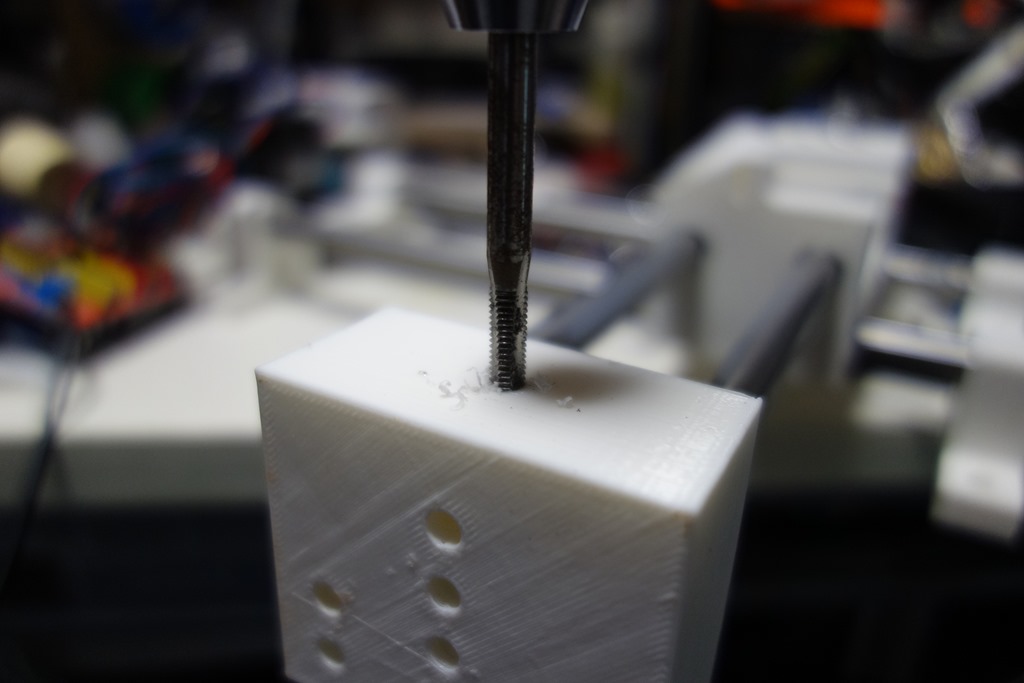
アイドラーを取り付けるためのタップ立て。
3Dプリンタが流行り始めてタイミングプーリーやベルトなどセットで手に入るので
ホント便利です。
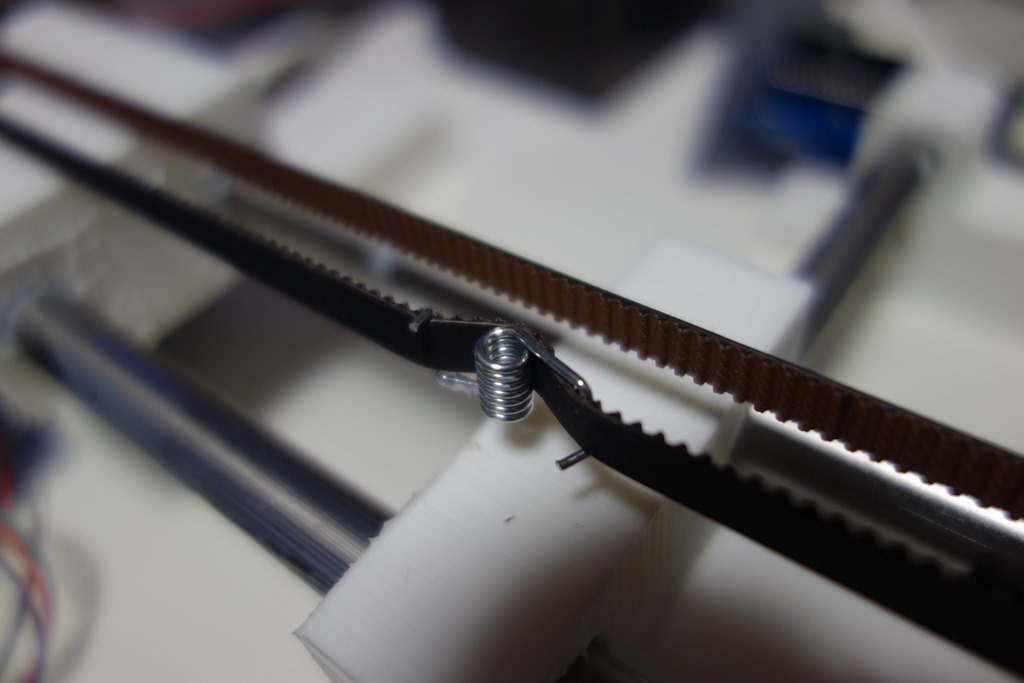
タイミングベルトは張った状態でアロンアルファで固定。
X軸も同様に。
ベルトを張るためのバネが入ってました。
こんなのがあるんですねw。
容易に取り付けできて便利なので3Dプリンタにも取付ました。
バネだけ10個入りで600円ほどで売っていたのであとで追加購入。
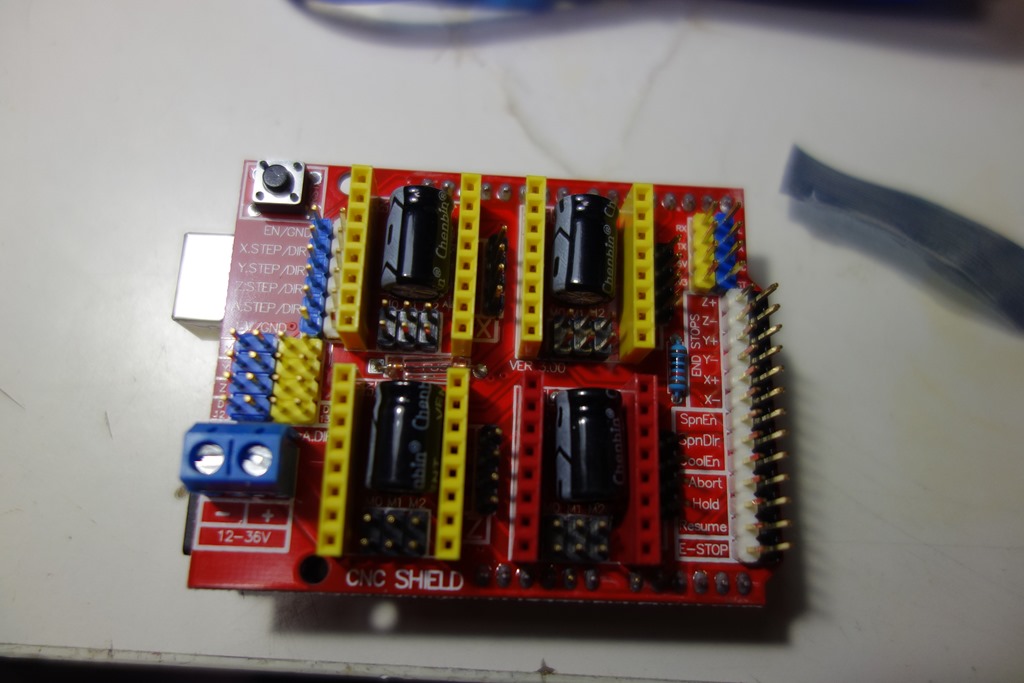
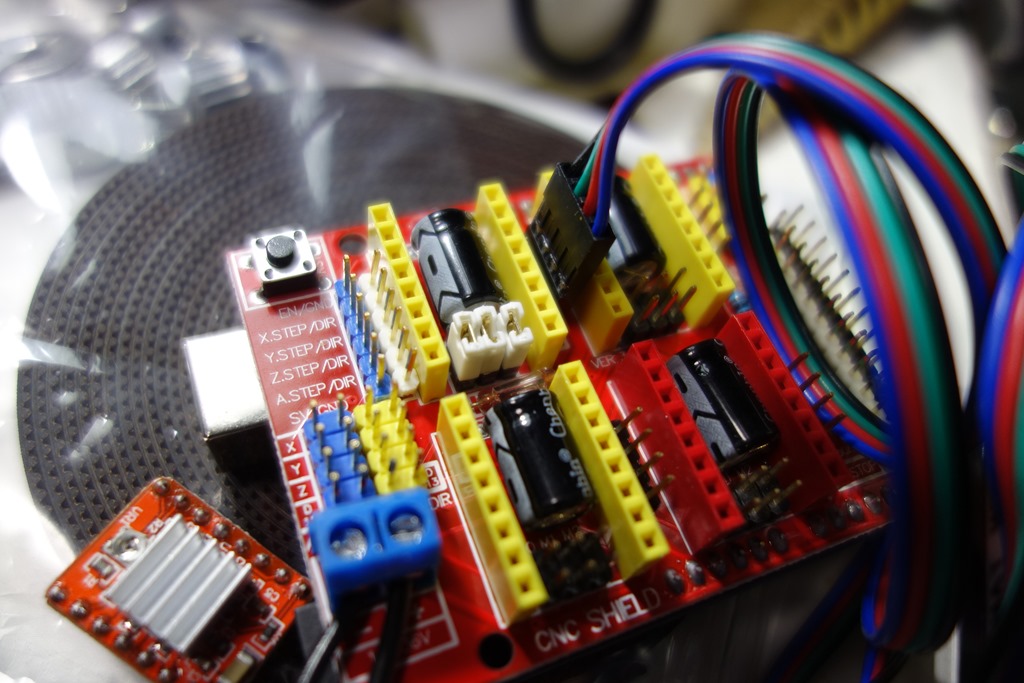
ハードが組み上がったので今度はコントローラーです。
Arduino互換機とCNCシールドのセットを購入しました。
grbl CNCで今回は制御します。
まずシールドを装着。
制御の精度を高めるためマイクロステップを選択します。
ショートピンを3つとも付属のジャンパーでつなぎマイクロステップにします。
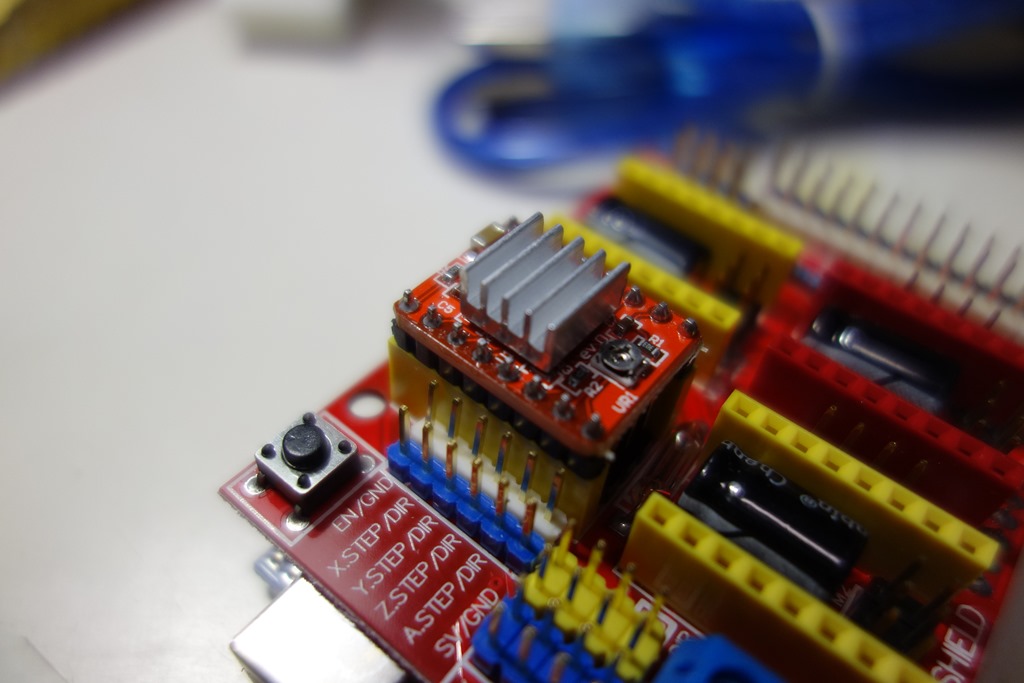
基板上にENと書かれたほうにドライバのENABLE端子が来るように
挿します。
逆に挿すと煙出て壊れるので注意。
これでプロッタXY部分が完成しました。
適当にプログラム組んで動かしてみました。
あとはペンの昇降機構を作るだけなのですがペンの動作のみサーボを使いたいので
そのままだとCNCシールドでは制御できません。
シールドから出てくるCW/CCW信号をもう一台のArduinoで読み取り
サーボを制御しようかと考え中です。
以下今回のプロッタに使ったものです。
This website uses cookies.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}