

前進・左旋回のモーションをコピーして後退と右旋回ができました。
こうまとめてると非常に作業しやすかったので今後ロボット作るときなど
使えそうです。
次にいよいよラジコン化することにしました。

Xbeeモジュールを搭載して通信ができるようにします。
電源は単3エネループ4本で駆動。

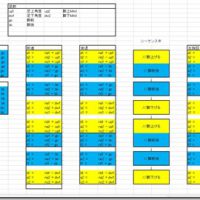
テスト用に組んだリモコンです。
モバイルバッテリーを電源に使ったのですが消費電力が少なすぎる
ためかすぐに電源を切られるので別の電源を探そうと思います。

動いた(*´ω`*)
なんか見てるとほっこりしますね・・・。
とりあえず基礎部分ができたのでこれから改良していこうかと思ってます。





