虫のような動きをどうやって付けるか悩み
なかなか手がつけられなかったのですがとにかくやってみようと
制御部の製作にとりかかりました。
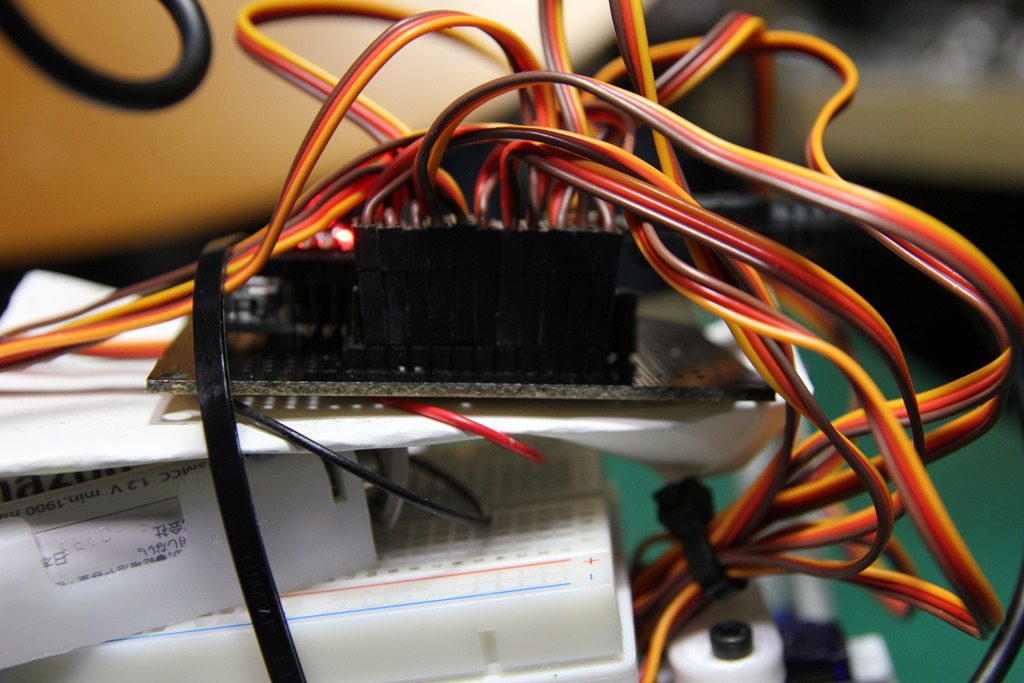
制御はArduino Nano互換機で行います。
サーボ12個分の端子を接続したらぎっちぎちに・・・。
無理やり差し込みましたが今度からは4個ごとに1ピッチ離して端子を
配置した方がいいですね。
仮組み状態。
ブレッドボード結局必要なかったので新しく基板の台座を
作り直す予定です。
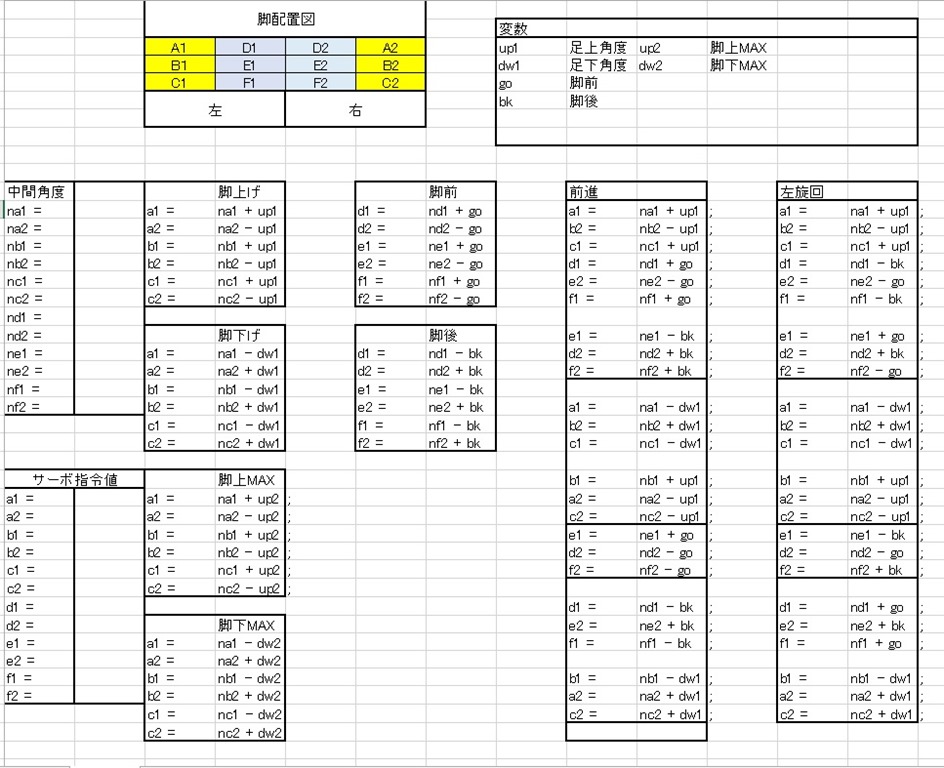
昆虫の三脚歩行を参考にモーションを作っていきます。
(多分三脚歩行)
脚に番号を振り当て神エクセルで各動きに対してサーボを何度
動かすかまとめます。
複雑なプログラムとか計算ワタシワカラナイ。
そしてこんな状態にw
これをそのままArduinoのスケッチにコピペしてモーションをつくります。
単純に
サーボに指令を出す前に計算
↓
角度の書き換え
↓
サーボ制御
の繰り返しです。
数値を書き込むの面倒なので・・・。
今のところスクワットと前進、左旋回のモーションのみですが
動きの基礎ができたのであとはサクサク進められそうです。
This website uses cookies.
{kind=link}
{kind=link}
{kind=link}